Схемы и формулы.
| №№ |
Схема |
Станок/
Оборудование |
Формулы Прямого
преобразования |
Формулы Обратного
преобразования |
| 1. |
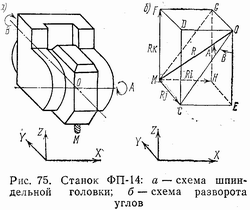 |
MA-655C5
ФП-14В7,
FSQV-80 |
i=cos(A)sin(B),
j=–sin(A),
k=cos(A)cos(B).
|
A=–arcsin(j),
B=arctg(i/k).
преобразование однозначно (единственно, из-за ограничений
накладываемых на узлы перемещений) |
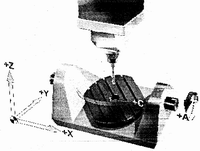
| 2. |
стол (ось B),
ось Z - ось инструмента. |
AGP-800-630 |
i=sin(B),
j=0,
k=cos(B).
|
B0=arctg(i/k)
| i≥0
k>0 => B=B0 |
| i≥0
k≤0 => B=B0+π |
| i<0
k<0 => B=B0+π |
| i<0
k≥0 => B=B0+2π |
Дополнительный угол:
BД=(–1)*sign(B)*(2π–|B|)
|
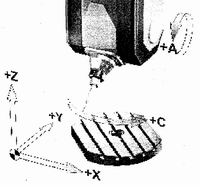
| 3. |
стол (оси
B и C) |
DMU-35M
оси B и C -
ручные!! |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
(B1,C1)
(B2,C2)
B1=arccos(k),
C0=arctg(i/j)
| i>0 j>0 =>
C1=C0 |
| i≤0 j≥0 =>
C1=C0+π |
| i<0 j<0 =>
C1=C0+π |
| i≥0 j≤0 =>
C1=C0+2π |
B2=–B1=–arccos(k)
C2=C1+π
|
| 4. |
|
ВФ-5ВС
??? |
i=sin(B),
j=–sin(A)cos(B),
k=cos(A)cos(B).
|
|
| 5. |
 |
Variaxis-630 5x
Hermle C600U
|
i=sin(A)sin(C),
j=–sin(A)cos(C),
k=cos(A).
|
(A1,C1) (A2,C2)
A1=arccos(k)≥0,
C0=arctg(–i/j)=–arctg(i/j)
| i≥0 j≤0 =>
C1=C0 |
| i≥0 j>0 =>
C1=C0+π |
| i<0 j>0 =>
C1=C0+π |
| i<0 j≤0 =>
C1=C0+2π |
A2=–arccos(k)
C2=C1+π
|
| 6. |
 |
DMU-125PA |
i=sin(A)sin(C),
j=–sin(A)cos(C),
k=cos(A).
|
см. Variaxis-630 5x
|
| 7. |
 |
Mag 3.Ex |
i=sin(A)sin(C),
j=–sin(A)cos(C),
k=cos(A).
|
обратный расчет - чуточку иной, чем
Variaxis-630 5x |
| 8. |
 |
NC-1325IP |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
см. DMU-35M
|
| 9. |
|
ВФТ-5 |
i=sin(A)sin(C),
j=–sin(A)cos(C),
k=cos(A).
|
(A1,C1) (A2,C2)
A1=arccos(k),
C0=arctg(–i/j)=–arctg(i/j)
| i≤0 j>0 =>
C1=C0 |
| i≤0 j≤0 =>
C1=C0+π |
| i>0 j<0 =>
C1=C0+π |
| i>0 j≥0 =>
C1=C0+2π |
A2=–A1
C2=C1+π
похоже на сх. Variaxis-630 5x |
| 10. |
|
РФП-6К |
i=–sin(A)sin(C),
j=sin(A)cos(C),
k=cos(A).
|
(A1,C1) (A2,C2)
A1=arccos(k),
C0=arctg(–i/j)=–arctg(i/j)
| n=1,2 =>
C1=C0+π |
| n=4 =>
C1=C0 |
| n=3 =>
C1=C0+2π |
| |
A2=–A1
C2=C1+π
|
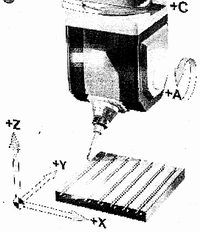
| 11. |
B - голова , С
- стол |
СКФ5-300 |
i=sin(B)cos(C),
j=–sin(B)sin(C),
k=cos(B).
|
(B1,C1)
(B2,C2)
B1=arccos(k),
C0=arctg(–i/j)=–arctg(i/j)
| n=2,3 =>
C1=C0+π |
| n=4 =>
C1=C0 |
| n=1 =>
C1=C0+2π |
| |
B2=–B1
C2=C1+π
|
| 12. |
|
V-Star,
ВФ-5ВС |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
ну
практически тоже самое , что и см.
DMU-35M |
| 13. |
Primery Axis - B Axis
# This is the Head with the rotary Axis inclined at approximately 45deg to
the Z ot Y axis of MCS
#
# Secondary Axis - C Axis
# This is the Table of the machine |
DMU-50eV |
k=(1+cos(B))/2,
j=cos(B)cos(C)
- cos(C)(1+cos(B))/2 + sin(C)cos(45°)sin(B),
i=cos(C)cos(45°)sin(B)-cos(B)sin(C)
+ sin(C)(1+cos(B))/2,
|
B1=arccos(2k–1)
повернем плоскость для разрешения:
p1=(–i)(k-1)+j*p0
p2=(–j)(k-1)-i*p0
где p0=sin(B1)cos(45°)
C0=arctg(p2/p1)
| p1≥0
p2≤0
=> C1=C0+ π/2 |
| p1>0
p2>0
=> C1=C0+π/2 |
| p1≤0
p2≥0
=> C1=C0+3π/2 |
| p1<0
p2<0
=> C1=C0 + 3π/2 |
B2=B1
C2=C1–2π
|
| 14. |
B - голова , С
- стол |
DMU-125PB,
DMU-200PB,
DMU-80PduoBLOCK |
k=(1+cos(B))/2,
j= -cos(B)cos(C)
+ cos(C)(1+cos(B))/2 + sin(C)cos(45°)sin(B),
i=cos(C)cos(45°)sin(B)+cos(B)cos(C)
- sin(C)(1+cos(B))/2,
|
B1=arccos(2k-1)
аналогично,
повернем плоскость:
p1=(+i)(k–1)+j*p0
p2=(+j)(k–1)-i*p0
где p0=sin(B1)cos(45°)
C0=arctg(p2/p1)
| p1≥0
p2≤0
=> C1=C0+ π/2 |
| p1>0
p2>0
=> C1=C0+π/2 |
| p1≤0
p2≥0
=>
C1=C0+3π/2 |
| p1<0
p2<0
=> C1=C0 + 3π/2 |
B2=B1
C2=C1–2π
|
| 15. |

Из книги "Проектирование постпроцессоров" |
ФП-11,
ФП-4,
ФП-6, |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
??????????????????????
ψ=arccos(2k–1),
δ=arccos( sqrt((1-k)/(1+k)) ),
γ= arctg(i/j) , n=1,C1=γ–δ
, B1=ψ
C2=γ+δ
, B2=-ψ
........ |
| 16. |
голова (оси
B и C) |
FS10.000 |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
Homework for You |
| 17. |
KX100 |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
Homework for You |
| 18. |
Modumill 300T |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
Homework for You |
| 20. |
голова (оси
A и C) |
Endura 900LB
Endura 10LB |
i=sin(A)sin(C),
j=–sin(A)cos(C),
k=cos(A).
|
Homework for You |
| 21. |
B - голова , С
- стол |
DMU-40monoBLOCK
DMU-80monoBLOCK |
i=sin(B)cos(C),
j=sin(B)sin(C),
k=cos(B).
|
Homework for You |
| 22. |
A -
голова |
DMU 360L |
i=0,
j=–sin(A),
k=cos(A).
|
Homework for You |
| 23. |
B - голова |
i=sin(B),
j=0,
k=cos(B).
|
Homework for You |
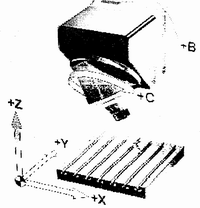
| |
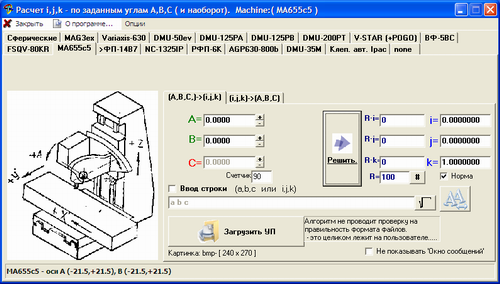
Давайте я быстро покажу как получить вектора
{i,j,k}.
Как вы знаете из курса аналитической геометрии, для
поворота системы координат существуют матрицы поворота:

Пусть нам дан единичный вектор (вектор инструмента):

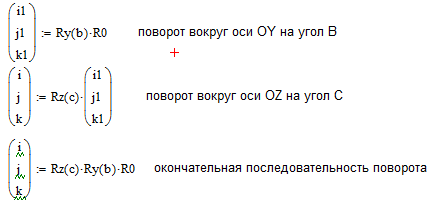
I. Рассмотрим для начала упрощенную схему станка:
Повернем систему координат вокруг оси OY на
угол B, а затем вокруг оси OZ
на угол C
|
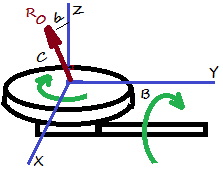 |
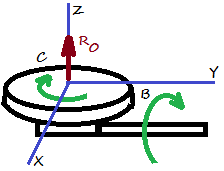
Тогда последовательность матриц
поворота будет иметь следующий вид:
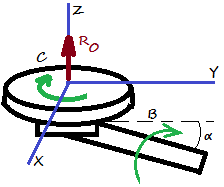
Здесь для наглядности и упрощения рисования я наклонил вектор
R0. Но, Вы должны
помнить. Вектор R0 -
неподвижен! Мы вращаем систему
координат, вместе со станком (вращаем
сковороду)! |
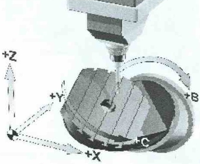
II.Усложним схему станка и наклоним ось OY
на
некоторый угол α.
Составим матрицу поворота.
Так как наряду с вращением относительно осей абсолютной
системы координат OXYZ подвижная система отсчёта OUVW может совершать
поворот вокруг собственных осей. В этом случае результирующая матрица
поворота может быть получена с использованием следующих правил:
1. Вначале обе системы координат совпадают, и,
следовательно, матрица поворота представляет собой единичную матрицу
размерностью 3x3.
2. Если подвижная система координат OUVW совершает поворот
вокруг одной из основных осей системы OXYZ, матрицу предыдущего
результирующего поворота надо умножить слева на соответствующую матрицу
элементарного поворота.
3. Если подвижная система координат OUVW совершает поворот
вокруг одной из своих основных осей, матрицу предыдущего результирующего
поворота надо умножить справа на соответствующую матрицу элементарного
поворота.
|
 |
1. имеем первоначальную матрицу
поворота I -
единичная (3x3).
2. Rx(α) - совершаем поворот на угол α
относительно OX
3. Rу(B) - совершаем поворот на
угол B относительно
OY
4. Rx(-α) - проводим обратную операцию
5. Rz(C) - поворачиваем ось OZ на
угол C.
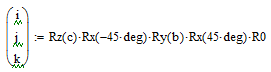
Окончательно, получим:
R=Rz(C)·Rx(-α)·Rу(B)·Rx(α)·I |
При α=45
º - мы получаем стандартную схему
DMU-50eV:
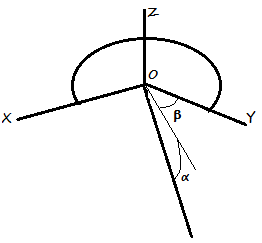
III.Еще раз усложним схему. Введем по мимо угла
α в плоскости OYZ, еще угол
b в плоскости
OXY.
|
 |
1. имеем первоначальную матрицу
поворота I -
единичная (3x3).
2. Rx(b) - совершаем поворот на угол
b
относительно OZ
3. Rу(α) - совершаем поворот на
угол α относительно
OX
4. Rу(B) - совершаем поворот на
угол B относительно
OY
5. Rx(-α) - проводим обратную операцию
6. Rx(-b) - проводим обратную операцию
7. Rz(C) - поворачиваем ось OZ на
угол C.
Окончательно, получим:
R=Rz(C)·Rz(-b)·Rx(-α)·Rу(B)·Rx(α)·Rz(b)·I |
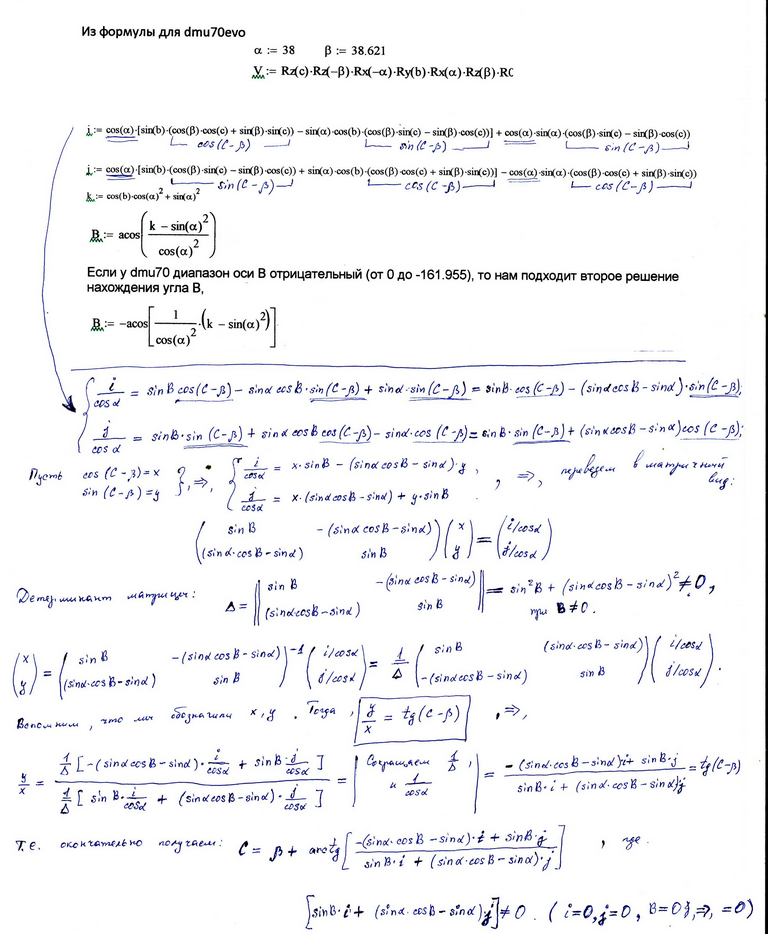
Как частный случай, для
DMU-70eV при
α=38
º и
b=38.621
º
получим:

Пример расчета в MathCad'е: Kin_matr.mcd
|
| 24. |
|
DMU-70eV |
см выше. |
Homework for You,
for example:
Dmu70eV_rivert3.png
Dmu70eV_rivert.mcd |
| 26. |
|
|
|
|
| 27. |
|
|
|
|
| 28. |
|
|
|
|
| 29. |
|
|
|
|
| 30. |
|
|
|
|
| 31. |
|
|
|
|
| 32. |
|
|
|
|
| 33. |
|
|
|
|
| 34. |
|
|
|
|
| 35. |
|
|
|
|
| 36. |
|
|
|
|
| |
|
|
|
|


{kind=link}